Exercícios - Vetores
Exercícios de fixação
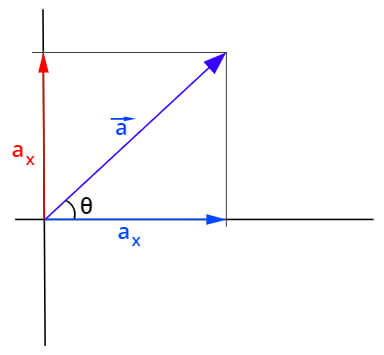
Vetores
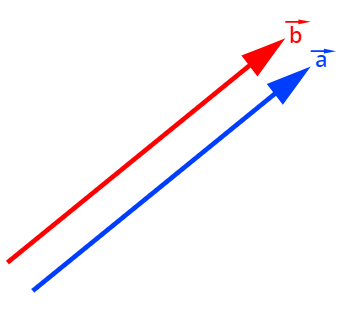
Vetor resultante
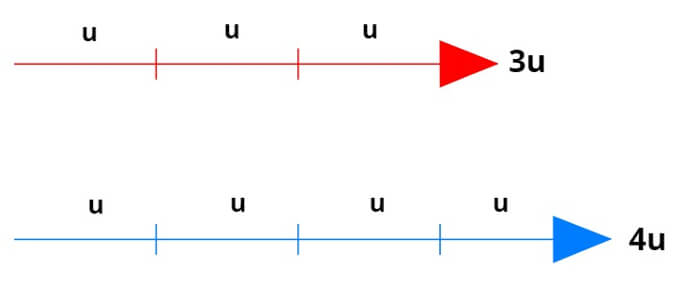
Operações com vetores
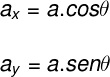
→ Soma de vetores
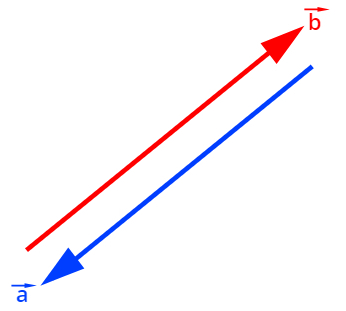
→ Subtração de vetores

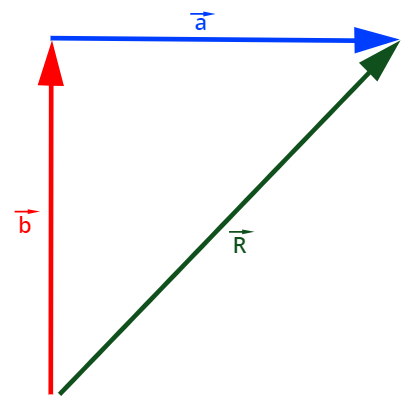
→ Vetores perpendiculares: Teorema de Pitágoras
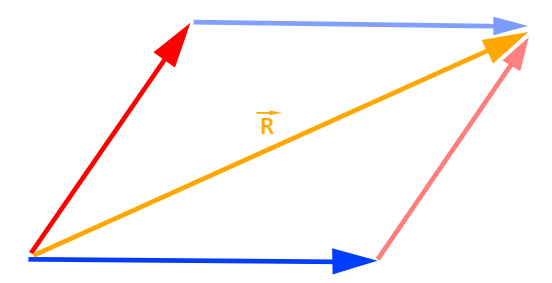
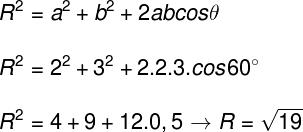
→ Vetores oblíquos: regra do paralelogramo
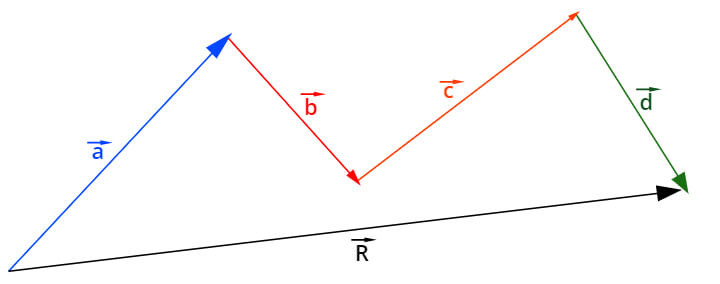
→ Resultante de vários vetores
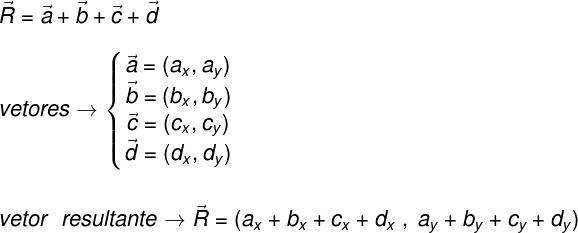
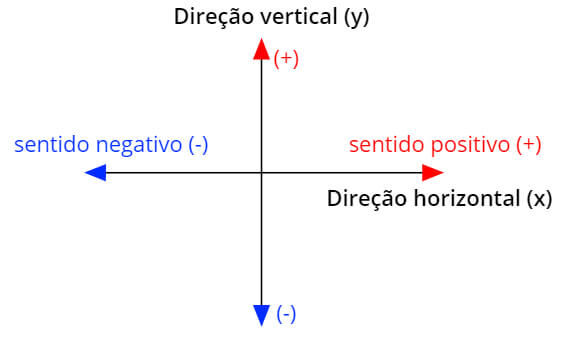
 Para expressar a soma de vetores na forma de somatório, considere dois vetores e com componentes e , respectivamente. A soma desses vetores também é um vetor, onde cada componente é a soma dos componentes correspondentes de e .
Para expressar a soma de vetores na forma de somatório, considere dois vetores e com componentes e , respectivamente. A soma desses vetores também é um vetor, onde cada componente é a soma dos componentes correspondentes de e .
Exemplo
Passo 1: Definir a soma em termos de somatório
Passo 2: Somar as componentes de cada direção
Passo 3: Escrever o vetor soma
Resumo
Atividade: Estude os exercícios resolvidos sobre vetores e desenvolva:
Exercícios resolvidos
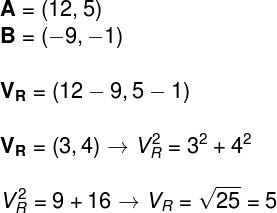

Passo 1: Definir a soma em termos de somatório
Passo 2: Somar as componentes de cada direção
Passo 3: Escrever o vetor soma
Resumo

Atualizado